


Nutikate robotniidukite turg on mitme miljardi dollari suurune, peamiselt järgmistel kaalutlustel:
1. Suur turunõudlus: Sellistes piirkondades nagu Euroopa ja Põhja-Ameerika on privaatse aia või muruplatsi omamine väga levinud, mistõttu on muru niitmine igapäevaelus oluline ülesanne. Traditsiooniline käsitsi niitmine või töötajate palkamine niitmiseks on mitte ainult aeganõudev ja töömahukas, vaid ka kulukas. Seetõttu on turul märkimisväärne nõudlus nutikate robotniidukite järele, mis suudavad niitmisülesandeid autonoomselt täita.
2. Tehnoloogiliste uuenduste võimalused: Tänu selliste tehnoloogiate nagu andurite, navigatsioonisüsteemide ja tehisintellekti pidevale arengule on nutikate robotniidukite jõudlus pidevalt paranenud ja nende funktsionaalsus on muutunud üha rikkalikumaks. Need suudavad saavutada autonoomse navigeerimise, takistuste vältimise, tee planeerimise, automaatse laadimise jne, parandades oluliselt muru niitmise tõhusust ja mugavust. See tehnoloogiline innovatsioon toetab tugevalt nutikate robotniidukite turu kiiret arengut.
3. Keskkonnakaitse ja energiatõhususe trendid: Võrreldes traditsiooniliste käsitsi või bensiinimootoriga muruniidukitega on nutikatel robotniidukitel madalam müratase ja heitkogused, mille tulemuseks on väiksem keskkonnamõju. Keskkonnakaitse ja energiatõhususe trendide tõttu valib üha rohkem tarbijaid traditsiooniliste niitmismeetodite asendamiseks nutikaid robotniidukeid.
4. Küps tööstusahel: Hiinal on täielik masinaehitustööstuse ahel, millel on tugevad võimalused teadus- ja arendustegevuses, disainis, tootmises ja müügis. See võimaldab Hiinal kiiresti reageerida ülemaailmse turu nõudmistele ja toota kvaliteetseid ja konkurentsivõimelisi nutikaid robotniidukeid. Lisaks eeldatakse, et tänu ülemaailmse tootmistööstuse ülekandmisele ja ajakohastamisele suureneb Hiina osakaal ülemaailmsel nutikate robotniidukite turul veelgi.
Kokkuvõttes võib öelda, et selliste tegurite põhjal nagu tohutu turunõudlus, tehnoloogilise innovatsiooni pakutavad võimalused, keskkonnakaitse ja energiatõhususe trendid ning küps tööstusharu ahel, peetakse nutikaid robotniidukeid mitme miljardi dollari suuruseks potentsiaalseks turuks.
Projekti eesmärgid
Siin on projekti eesmärkide kiire ülevaade:
✔️ Autonoomne muruniitmine: Seade peaks suutma muru automaatselt niita.
✔️ Head ohutusfunktsioonid: Seade peab olema ohutu, näiteks hädapeatumise abil tõstmisel või takistustega kokkupõrkel.
✔️ Perimeetrijuhtmeid pole vaja: Soovime paindlikkust ja tuge mitme niitmisala jaoks ilma perimeetrijuhtmeteta.
✔️ Madal hind: See peaks olema odavam kui keskmise hinnaklassi kommertstooted.
✔️ Avatud: Soovin jagada teadmisi ja aidata teistel OpenMowerit luua.
✔️ Esteetiline: OpenMoweri muru niitmise ees ei tohiks piinlikkust tunda.
✔️ Takistuste vältimine: Muruniiduk peaks niitmise ajal takistusi tuvastama ja neid vältima.
✔️ Vihmaandur: Seade peaks suutma tuvastada ebasoodsaid ilmastikutingimusi ja niitmise peatada, kuni tingimused paranevad.
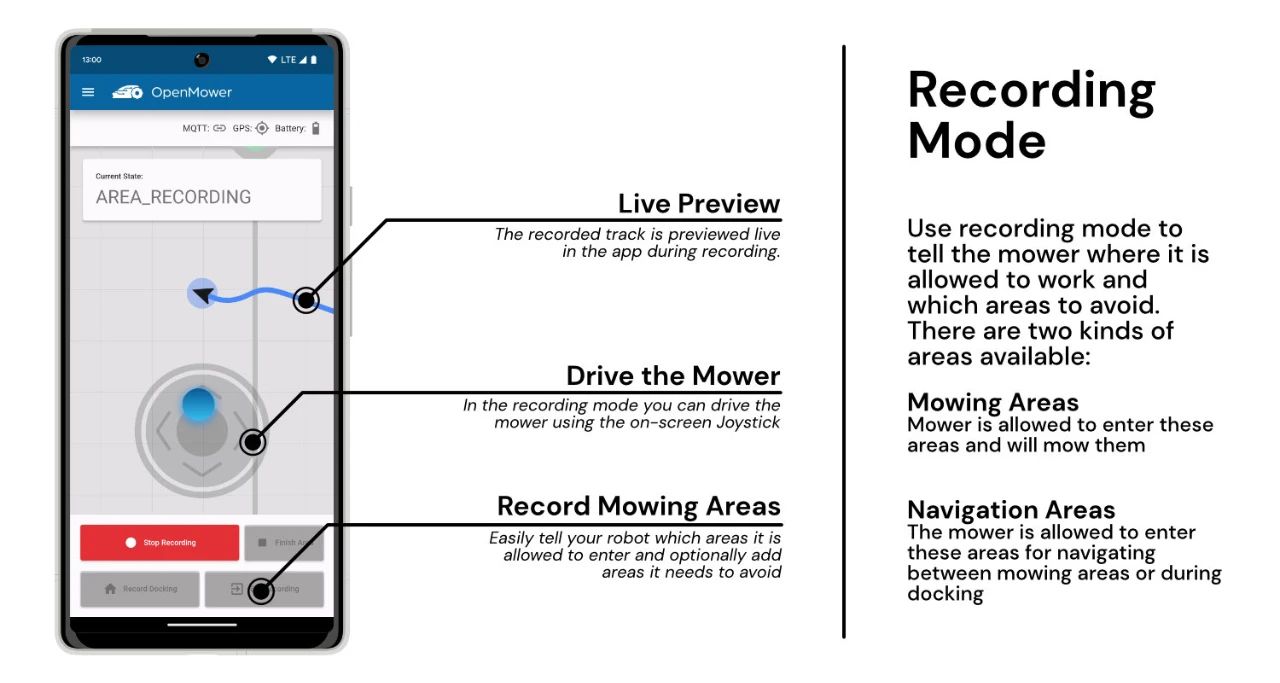
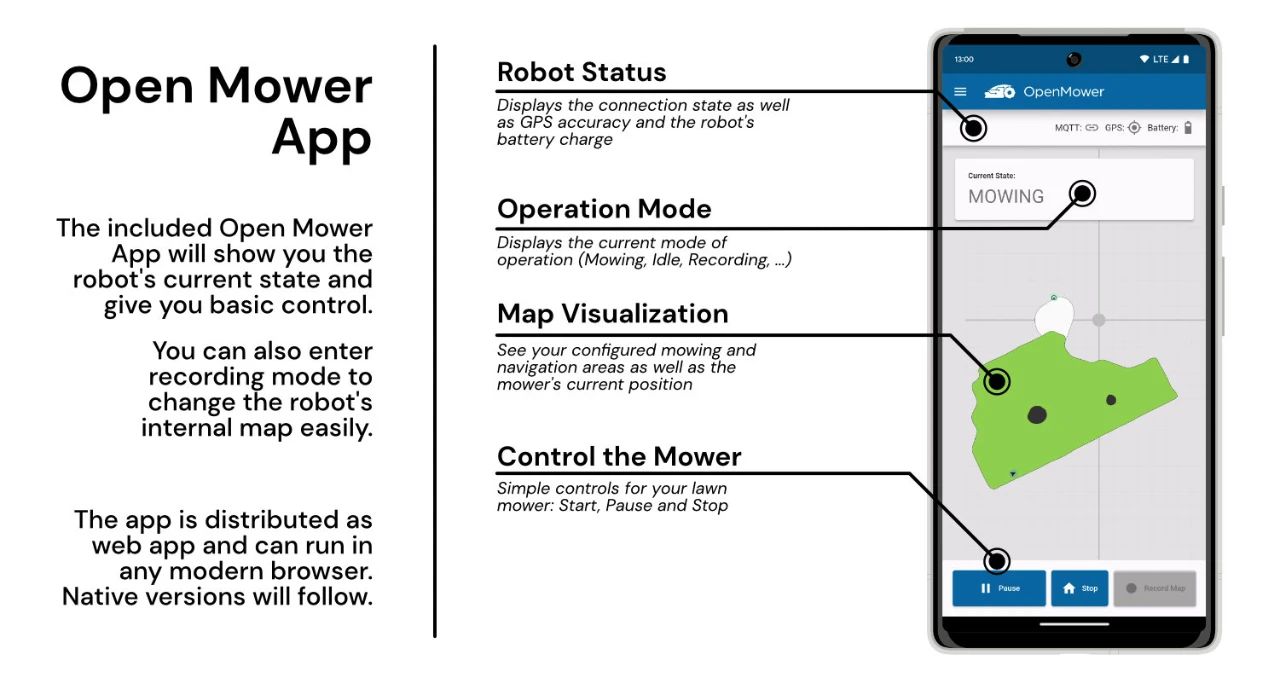
Rakenduste esitlus
Riistvara
Siiani on meil olemas emaplaadi stabiilne versioon ja kaks sellega kaasnevat mootorikontrollerit. xESC mini ja xESC 2040. Praegu kasutan kokkupanekuks xESC minit ja see töötab suurepäraselt. Selle kontrolleri probleem on see, et selle komponente on raske leida. Seetõttu loome xESC 2040 RP2040 kiibi põhjal. See on odav variant, mis on praegu katsejärgus.
Riistvara ülesannete nimekiri
Projektilähenemine
Me lammutasime maha kõige odavama müügiloleva robotniiduki, mille leidsime (YardForce Classic 500), ja olime meeldivalt üllatunud riistvara kvaliteedist:
Käigukastiga harjadeta mootorid ratastele
Muruniiduki enda harjadeta mootorid
Üldine konstruktsioon tundus vastupidav, veekindel ja läbimõeldud
Kõik komponendid ühendati standardsete pistikute abil, mis tegi riistvara uuendamise lihtsaks.
Muruniiduki emaplaat

ROS-i tööruum
See kaust toimib ROS-i tööruumina, mida kasutatakse OpenMoweri ROS-tarkvara loomiseks. Hoidla sisaldab ROS-pakette OpenMoweri juhtimiseks.
See viitab ka teistele tarkvara loomiseks vajalikele repositooriumidele (teekidele). See võimaldab meil jälgida igas väljaandes kasutatud pakettide täpseid versioone, et tagada ühilduvus. Praegu hõlmab see järgmisi repositooriume:
slic3r_katvusplaneerija:Slic3r tarkvaral põhinev 3D-printeriga niiduki planeerija. Seda kasutatakse niiduradade planeerimiseks.
teb_kohalik_planeerija:Kohalik planeerija, mis võimaldab robotil takistustest mööda navigeerida ja globaalset trajektoori järgida, järgides samal ajal kinemaatilisi piiranguid.
xesc_ros:ROS-liides xESC mootorikontrollerile.

Euroopas ja Ameerikas on paljudel leibkondadel oma aiad või muruplatsid tänu rohketele maaressurssidele, mistõttu on muruniitmine regulaarne. Traditsioonilised niitmismeetodid hõlmavad sageli töötajate palkamist, mis lisaks suurtele kuludele nõuab ka märkimisväärset aega ja vaeva järelevalve ja haldamise osas. Seetõttu on intelligentsetel automatiseeritud muruniidukitel suur turupotentsiaal.
Automaatsed muruniidukid integreerivad täiustatud andureid, navigatsioonisüsteeme ja tehisintellekti tehnoloogiat, mis võimaldab neil autonoomselt muru niita, takistustest üle saada ja radu planeerida. Kasutajad peavad vaid määrama niidetava ala ja kõrguse ning automaatne niiduk saab niitmisülesande automaatselt lõpule viia, parandades oluliselt efektiivsust ja säästes tööjõukulusid.
Lisaks on automatiseeritud muruniidukitel eelised keskkonnasõbralikkuse ja energiatõhususe poolest. Võrreldes traditsiooniliste käsitsi või bensiinimootoriga niidukitega tekitavad automatiseeritud niidukid vähem müra ja heitgaase, mille tulemuseks on minimaalne keskkonnamõju. Lisaks saavad automatiseeritud niidukid kohandada niitmisstrateegiaid vastavalt muru tegelikele tingimustele, vältides energia raiskamist.
Sellele turule sisenemiseks ja edu saavutamiseks tuleb aga arvestada mitmete teguritega. Esiteks peab automatiseeritud niidukite tehnoloogia olema küps ja usaldusväärne, et rahuldada kasutajate praktilisi vajadusi. Teiseks on hinnakujundus samuti oluline tegur, kuna liiga kõrged hinnad võivad takistada toote omaksvõttu. Lõpuks on oluline luua ulatuslik müügi- ja teenindusvõrk, et pakkuda kasutajatele mugavat tuge ja teenuseid.
Kokkuvõtteks võib öelda, et intelligentsetel automatiseeritud muruniidukitel on Euroopa ja Ameerika turgudel tohutu potentsiaal. Ärilise edu saavutamiseks on aga vaja pingutusi tehnoloogia, hinnakujunduse ja teenuste valdkonnas.

Kes suudab selle mitme miljardi dollari suuruse võimaluse ära kasutada?
Tehnoloogiaalane uurimis- ja arendustegevus:Investeerida pidevalt teadus- ja arendustegevusse, et parandada automatiseeritud muruniidukite intelligentsust, tõhusust ja töökindlust. Keskenduda kasutajate vajaduste ja regulatiivsete nõuete mõistmisele Euroopa ja Ameerika turgudel, et tagada toodete vastavus asjakohastele standarditele.
Brändi loomine:Hiina nutikate muruniidukite kaubamärgi kuvandi loomine rahvusvahelisel turul, et suurendada tarbijate teadlikkust ja usaldust Hiina toodete vastu. Seda saab saavutada osalemise kaudu rahvusvahelistel näitustel ja ühise reklaamimise kaudu kohalike partneritega Euroopas ja Ameerikas.
Müügikanalid:Luua ulatuslik müügivõrgustik ja teenindussüsteem, et tagada toodete sujuv sisenemine Euroopa ja Ameerika turgudele ning pakkuda õigeaegset tehnilist tuge ja teenuseid. Kaaluda koostööd kohalike jaemüüjate ja turustajatega Euroopas ja Ameerikas müügikanalite laiendamiseks.
Postituse aeg: 22. märts 2024